

作者のその他の人気の漫画

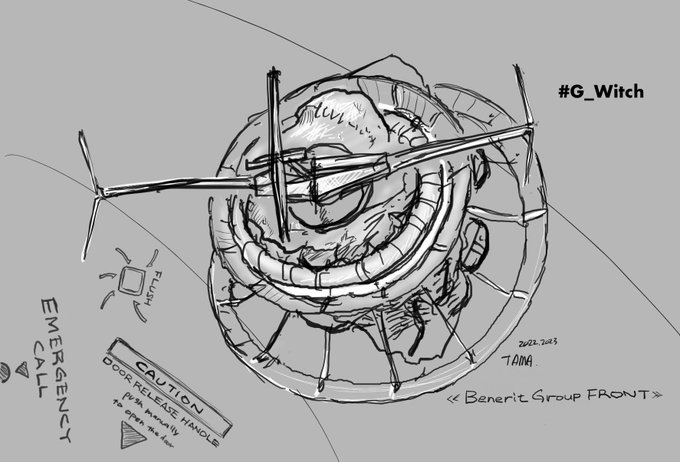
ガンダム水星の魔女で何をデザインしたのか良く訊かれるのですが、大はベネリットグループ・フロントの外観から小は無重力区画の女子トイレまで、宇宙建築・インテリア系の美術デザインを(チームで)担当しました。 #水星の魔女 #G_Witch
これは2002年に描いたもの。ベストなアングルを探って行きます。
未公開の絵が出て来ました。これも2001年だと思います。主力戦艦。アメリカのボードゲームに合わせてボロディーノ(ボロジノ)級と呼んでいました。
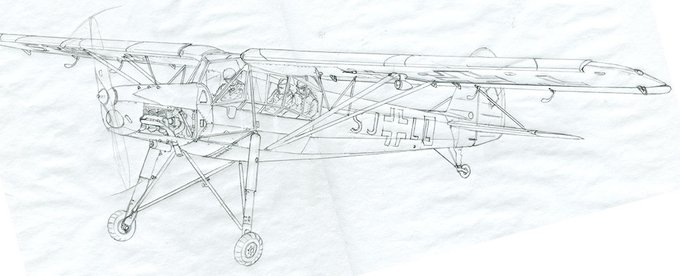
白色彗星の観測を行う為に急造された機体があったのでは、というもの。 ヤマトメカニクスでは原則としてオリジナルデザインを改変しない表現を追求して来ましたが、初期に自分オリジナルのバリエーションを作った事があります。海外のヤマトファンとの交流の中で進めたもの。2001年。
これも未公表だったもの。
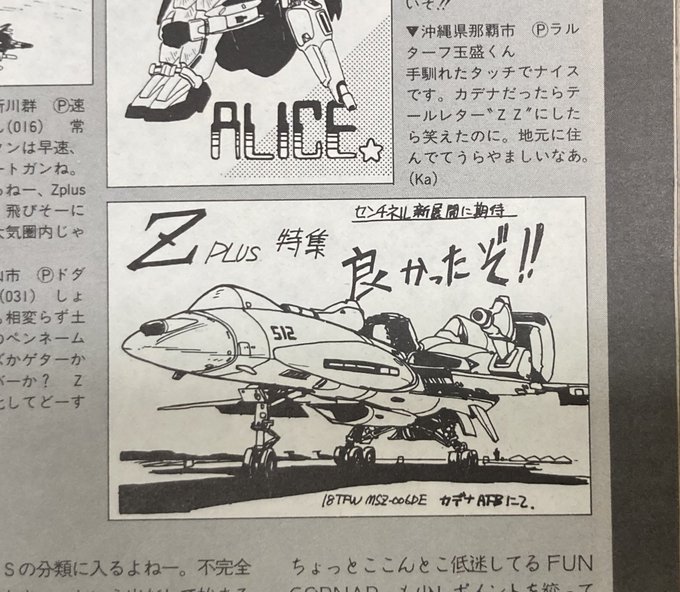
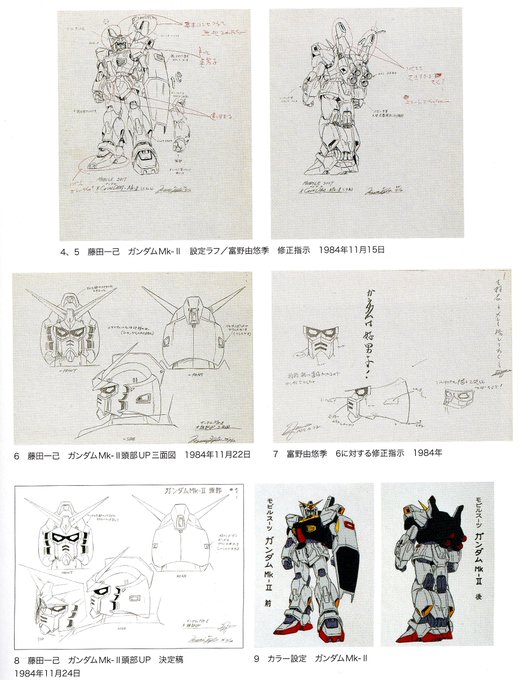
カトキさんのコメント貰えて嬉しかった学生時代。 1988年モデルグラフィックス誌への投稿。 テイルレターZZだとベタ過ぎるかと思い敢えて入れませんでしたが受け狙いも必要な時があるとこの時学びました。
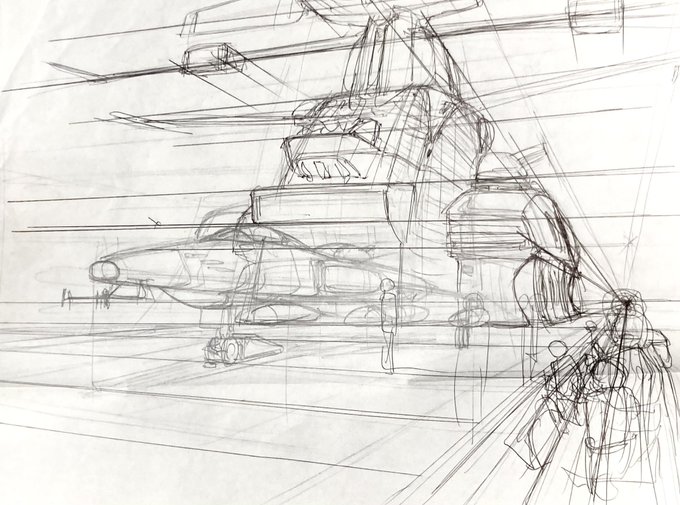
海外のヤマトファンが Cosmo Recon と呼んだので仮に命名していました。 彗星の尾に突入する時に使う風防に糸を貼り付けた簡易インジケーターがあります。
あ、これはこのように上下逆にしていました。
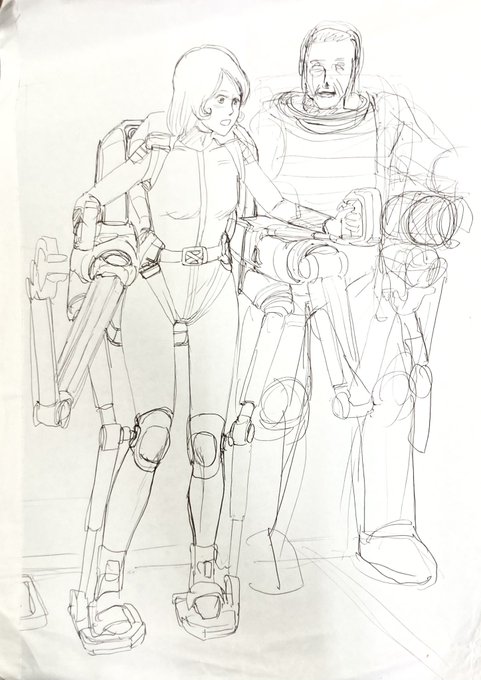
ボツの下図。74年の第1作ヤマトの船体補修作業で活躍した「マジックハンド」付きの船外活動装備は、スタジオぬえの強化服、外骨格の系譜に連なると思うのです。
パース。
ヤマトマガジン(ファンクラブ会報誌)に寄稿したイラストです。
一度清書しようとしたものの納得できず、未完。